OverView
前端:路径寻找
基于搜索
- 图搜索基础
- Dijkstra and A*
- Jump Point Search
基于采样
- Probabilstic Road Map
- RRT
- RRT* / Informed RRT
基于运动学动态路径寻找
- State-state Boundary Value Optimal Control Problem
- State Lattic Search
- Kinodynamic RRT*
- Hybrid A*
后端:轨迹生成
MINIMUN SNAP TRAJECTORY GENERATION
SOFT AND HARD CONSTRAINED TRAJECTORY OPTIMIZATION
MAP
Occupancy grid map
github:https://github.com/ANYbotics/grid_map
- 排列紧密
- 结构化
- 索引队列访问
缺点:当切分过于细密时空间占用率大.
Octo-map
github:https://github.com/OctoMap/octomap_mapping
地图中大部分为稀疏部分,使用八叉树的数据结构储存.如果一个区块没有障碍物,不再细分该区块;如果一个区块有障碍物则细分至最小包含该障碍物的区块.
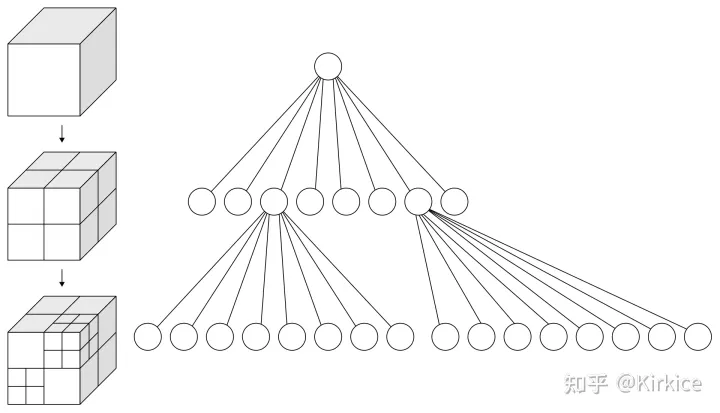
Octree
八叉树(Octree)是一种用于描述三维空间的树状数据结构。八叉树的每个节点表示一个正方体的体积元素,每个节点有八个子节点,将八个子节点所表示的体积元素加在一起就等于父节点的体积。八叉树是四叉树在三维空间上的扩展,二维上我们有四个象限,而三维上,我们有8个卦限。八叉树主要用于空间划分和最近邻搜索。
实现Octree的原理:
- 将当前的立方体细分为八个子立方体。
- 如果任何一个子立方体内包含多个点,则将其进一步细分为八个子立方体。
- 重复以上操作使得每个子立方体内包含最多一个点。
- 排列稀疏
- 结构化
- 非直接索引访问(树的查询)
Voxel hashing
github:https://github.com/niessner/VoxelHashing
记录存在碰撞的区块 —-> 哈希表,字典
一个bucket中划分为更小的voxel blocks
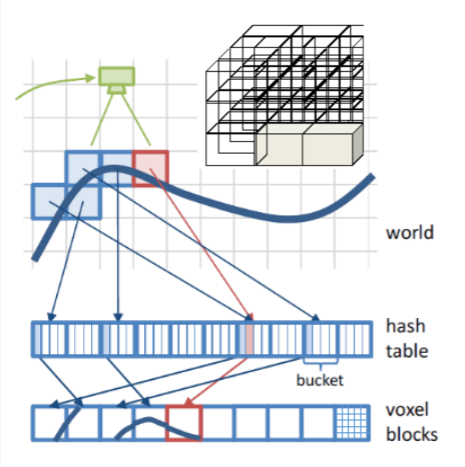
- 排列最稀疏
- 结构化
- 非直接索引访问(字典查询)
Point Cloud Map
- 无序
- 无法通过索引队列访问(除非自发遍历)
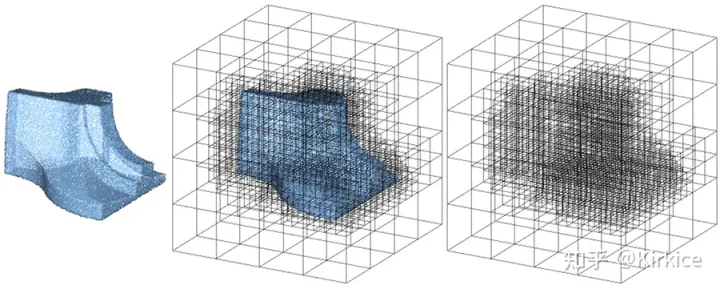
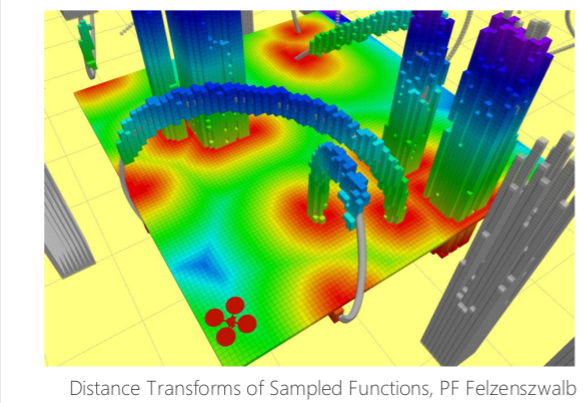
TSDF map
Truncated Signed Distance Functions (截断/有符号/距离函数)
github:
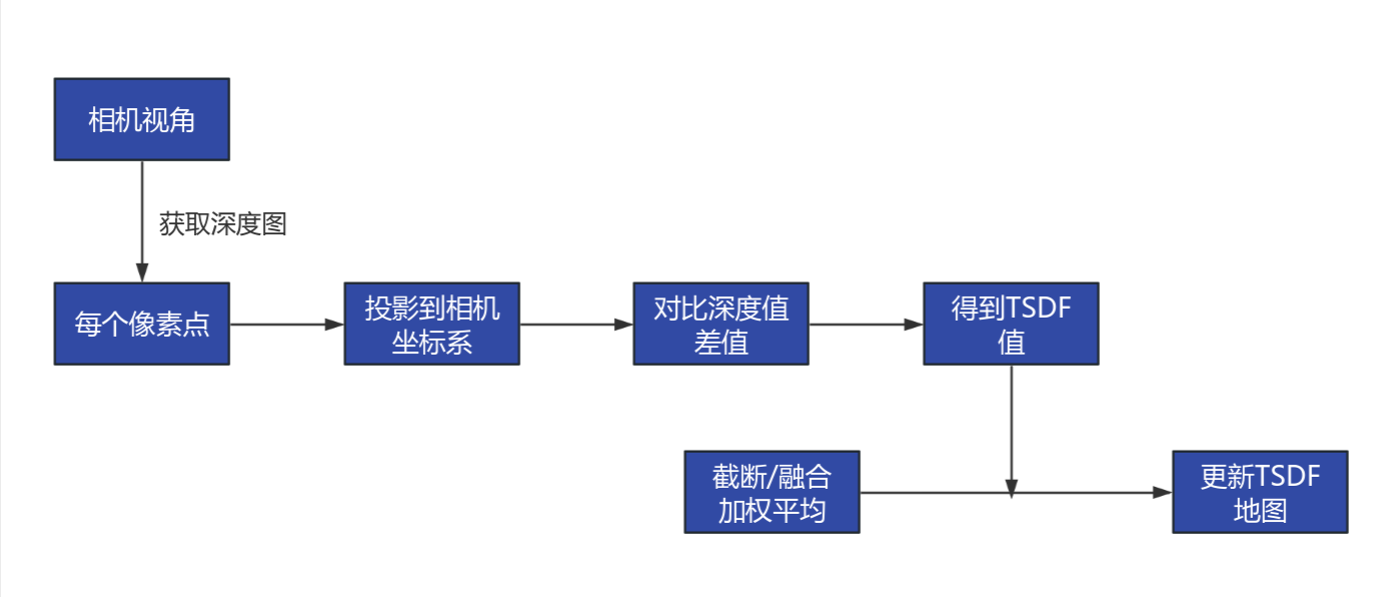
TSDF 是一种用于表示3D空间表面的体素网格地图.
Signed Distance Function (SDF)
对于空间中任意一点 x,SDF 给出它到最近表面的距离 d:
$$
SDF(x)=±d
$$
- +d:点在表面外部(通常指相机方向)
- −d:点在表面内部
- d=0:点在表面上(即零交叉点)
Truncated SDF(TSDF)
真实计算中远离表面部分的距离信息不重要且不准确,因此会进行截断:
- 若 ∣d∣> μ,则 TSDF 值为截断值。
- μ 是截断距离阈值(truncation distance)。
Voxel Grid(体素网格)
TSDF 存在于一个 3D 网格中(类似立方体像素):
- 每个体素(voxel)存储:
- 当前体素的 TSDF 值
- 加权平均值(来自多个观测帧)
- 权重(用于融合多个观测)

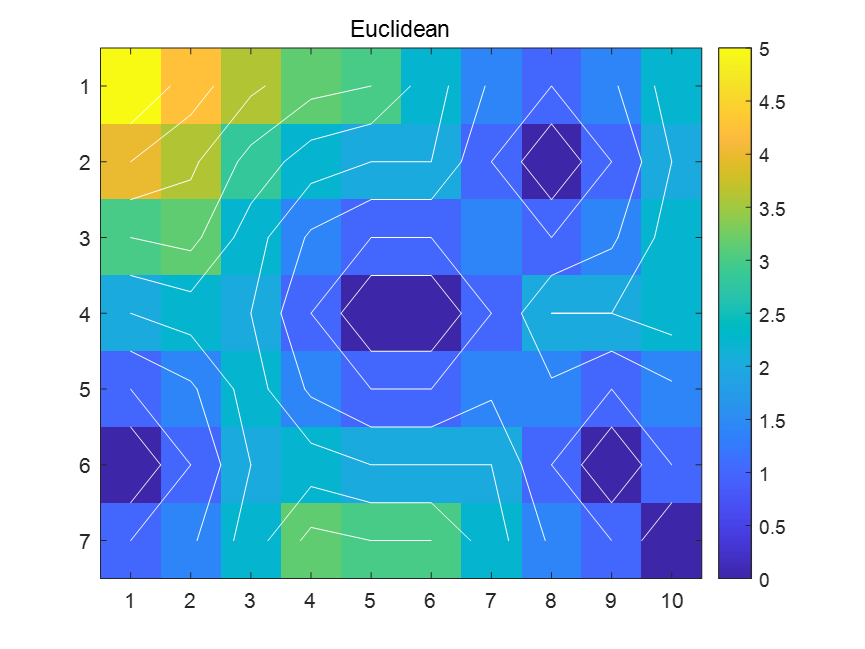
ESDF Map
Euclidean Signed Distance Field 欧几里得有符号距离场
以 3D 网格(体素)的形式表示环境中每一点到障碍物最近点的欧几里得距离,并附带符号来表示点位于障碍物内部或外部。局部ESDF地图:只记忆感兴趣部分的ESDF值.
Free-space Roadmap
概率路线图 —-> 安全通行区域,使用凸多边体表示
得到的是一个宽阔的解空间
Voronoi Diagram Map
高效利用ESDF提取地图骨架 —-> 稀疏
基于搜索的路径寻找
A*
A*算法在Dijkstra算法的基础上引入了启发函数(贪心思想),启发函数是对当前节点到目标节点所需代价的预估.启发式函数一般使用曼哈顿距离、欧几里德距离。
从起点开始,将其加入待探索的节点集合(open set)。
每次选择 f 值最小的节点进行扩展,其中
f(n) = g(n) + h(n)
g(n)是从起点到当前节点的实际代价h(n)是从当前节点到终点的启发式估计(如直线距离)
对当前节点的所有相邻节点,计算新的 g 值,更新路径记录。
如果发现更优路径(g 值更小),则更新该邻居的记录,并加入 open set。
重复以上步骤,直到终点被选中扩展,表示找到最短路径。
通过路径记录表回溯,重建从起点到终点的完整路径。
伪代码
|
Weighted A* Search
Sub-Optimal Solution
通过人为加大启发函数的影响力来获得更快的搜索速度,以牺牲路径最优性为代价。
f = g + εh, ε > 1 =bias towards states that are closer to goal.
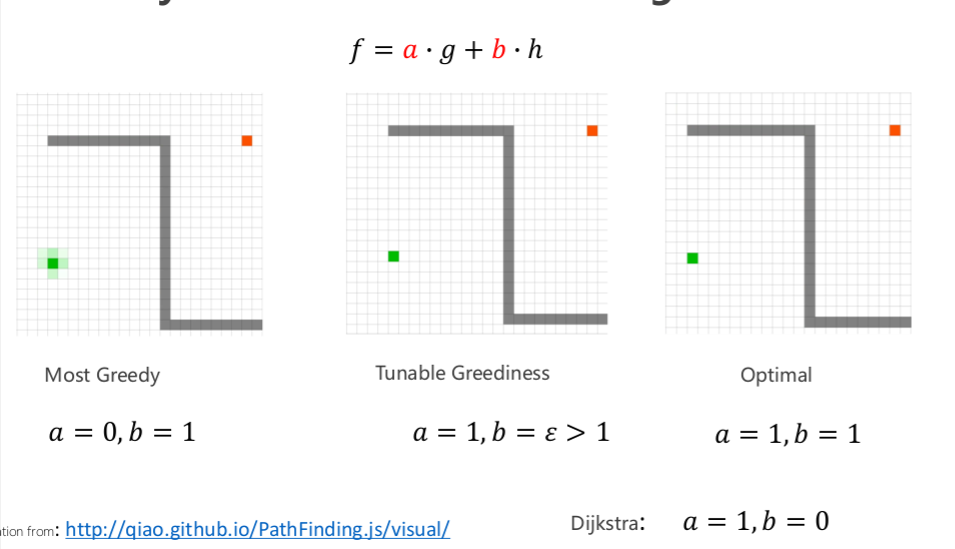
Most Greedy(最贪婪)
参数:a=0,b=1
只考虑启发式代价,完全不考虑当前路径代价
结果:趋向于直接朝目标点移动,但路径不一定最短或最优
Tunable Greediness(可调贪婪度)
参数:a=1,b=ε>1
综合考虑当前路径和启发式估计,但偏向启发式
结果:平衡探索性和效率,路径更合理
Optimal(最优路径)
参数:a=1,b=1
平等考虑已知路径和启发估计
结果:找到最优路径
Dijkstra算法
参数:a=1,b=0
完全不使用启发式,只靠实际代价 g,效率低
A*的实施流程
建立地图 → 生成网格节点数组
设定障碍 → 标记不可达节点
编写邻居搜索函数
编写A*主循环:
从openList中取出f值最小的节点
计算邻居的g/h/f值,加入openList
更新已访问节点(closedList)
使用
priority_queue或multimap优化性能
最好的启发函数
最好:tight,正确的最短距离函数
二维最佳启发函数:
$$
h2D=(dx+dy)+(2
−2)⋅min(dx,dy)
$$
三维最佳启发函数:我们记 dx,dy,dz为三维网格中当前点与目标点在三个轴上的距离(均为非负整数),有:
$$
h3D=dmin⋅3+(dmid−dmin)⋅2+(dmax−dmid)⋅1
$$
其中:dmin,dmid,dmax是 dx,dy,dzdx,dy,dz 的排序结果,使得$$
dmin≤dmid≤dmax
$$
Tie Breaker
平局处理器,打破 f 值相等时的探索顺序
- 问题:
A* 会选取 f 值最小的节点扩展(f=g+h)
但在一些情形下,很多节点的 f 值完全相等,尤其是在网格图中启发函数不够 tight 的时候
导致算法要探索很多不必要的节点,降低效率
- 解决方法:
- 人为干扰 h,让 f 值不同:
将原来的启发函数 h乘上一个微小因子:
$$
h=h×(1.0+p)
$$
其中:
$$
p < \frac{\text{最小步长代价}}{\text{预期路径总长度}}
$$
这样能 轻微打破平局,减少无效扩展代价是轻微地破坏启发式的“可采纳性”(admissibility),但常常实际无影响或带来更好效率.
- 优先选 h值小的节点
如果两个节点 f 一样,选择 h 小的那个(靠近终点)
- 加入伪随机干扰项(Deterministic random)
- 给每个节点加一个唯一扰动,保持一致性但不完全对称
- 优先靠近起点-终点连线的路径
$$
cross=∣dx1×dy2−dx2×dy1∣
$$这其实是在衡量点偏离直线的“面积”,越小越靠近理想路径。
Jump Point Search
核心思想:在两点之间没有障碍物时,中间的节点不考虑,只考虑重要节点.
- 邻居修剪 Neighbor Pruning
灰色节点:较差的邻居,当去到它们时,没有分值的路径更便宜。丢弃。
白色节点:自然邻居。
只需要考虑自然邻居.

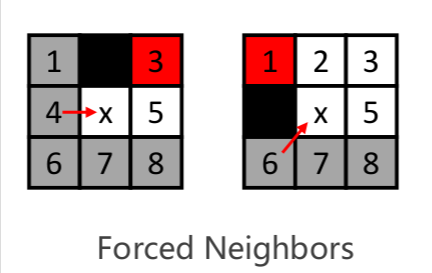
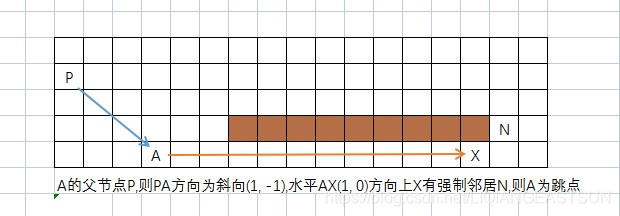
- 强迫邻居 Forced Neighbors
节点X的邻居节点有障碍物,且X的父节点P经过X到达N的距离代价,比不经过X到大N的任一路径的距离代价都小,则称N是X的强迫邻居。
有相邻的障碍
红色节点是强制邻居。
一条从父母到他们通过障碍的更便宜的路径被阻断。
- 跳点(Jump Point):什么样的节点可以作为跳点
(1)节点 A 是起点、终点.
(2)节点A 至少有一个强迫邻居.
(3)父节点在斜方向(斜向搜索),节点A的水平或者垂直方向上有满足 (1)、(2) 的节点
跳点搜索中,会递归地检查路径上的邻居节点是否是“跳点”。在检查对角线方向前,会优先尝试直线方向。只要某个节点通往某些邻居的最短路径必须经过它,它就会被标记为跳点。同时,对“强制邻居”不能剪枝,必须展开。
基于采样的路径寻找
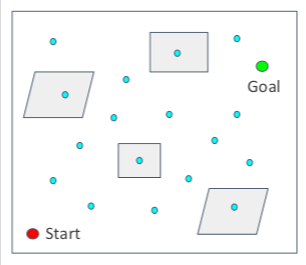
Probabilistic Road Map
图结构
将规划分为两个阶段:
·学习阶段
·查询阶段
检查采样配置和连接的样本之间的碰撞可以有效率地完成任务。
数量相对较少的里程碑和局部路径足以捕获的连通性。
- 限制路径点连接的长度避免图结构过于复杂
学习阶段:
- 在c空间中采样N个点
- 删除碰撞点
- 连接到最近的点,并获得无碰撞段。
- 删除碰撞段
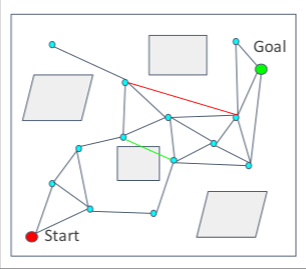
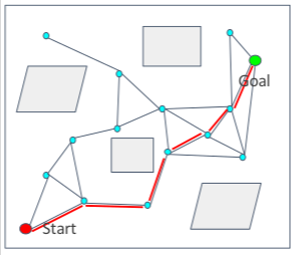
查询阶段:
- 在路线图上搜索,找到从起点到终点的路径目标(使用Dijkstra算法或A*算法)。
- 路线图现在类似于网格地图
优点
- 概率完备
缺点
要求解决两点边值问题
在状态空间上构建图,但不特别关注生成路径
效率不高
Lazy collision-checking
效率低: PRM(Probabilistic Roadmap)或 RRT(Rapidly-exploring Random Tree) 需要频繁地检查从一个配置到另一个配置(或状态)之间的路径是否与障碍物发生碰撞。但碰撞检测是一个昂贵的计算操作,尤其在高维空间或复杂环境中,频繁的碰撞检测会成为性能瓶颈。
- 不考虑采样点和生成分段碰撞(懒惰)
先构建图(PRM)或树(RRT)时不立即检查碰撞,等到真正要使用这条路径时(例如在查询最短路径、或者将路径从树/图中提取出来时),再执行碰撞检测。
PRM+Lazy collision-checking
构建 roadmap:采样节点、连接边,不做碰撞检测。
查询路径:使用 A* 或 Dijkstra 等算法找到一条从起点到终点的路径。
在该路径上进行逐段碰撞检测:
如果全部无碰撞,路径有效;
如果某段有碰撞,将该边标记为无效(不可达),从图中删除,重新搜索。
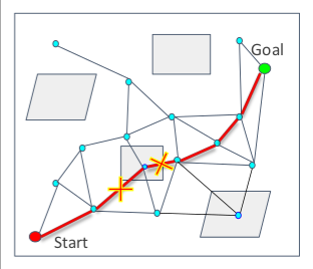
Rapidly-exploring Random Tree
核心思想:
通过生成next构建树状态在树中通过执行随机控制,从起点开始,不断向随机方向扩展一棵树,迅速探索整个状态空间。
伪代码:
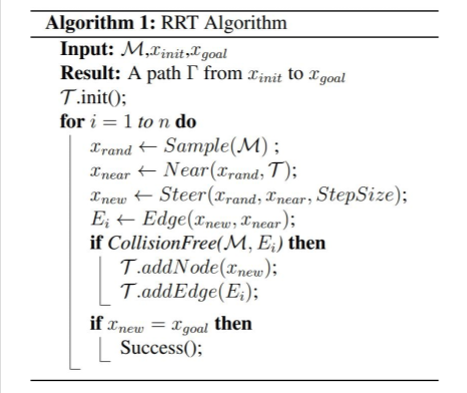
- 初始化一棵树
T,将起始点X_init作为树的根节点。 - 循环:
- 在整个状态空间中随机采样一个点
X_rand,用于探索新方向。 - 找出树
T中距离X_rand最近的已有节点X_nearest。 - 从
X_nearest朝q_rand方向延伸一个固定步长delta,生成新点X_new。
如果新点 X_new 是可行的(比如不与障碍物碰撞),则执行以下操作:
- 把这个新点
X_new加入树中,作为新的节点。 - 在树中添加一条从
X_nearest到X_new的路径边。 - 返回整个搜索生成的树
T,它包含从起点开始探索出来的路径结构。
**提前停止的条件:**因为每一段树枝的末端都是Xnew,所以每产生一次Xnew节点,我们都判断一下Xnew与终点之间的距离,看这个距离是否小于步长,如果小于步长且没有经过障碍物,则就直接把Xnew与终点进行相连。
优点:
·旨在找到从起点到目标的路径
·比PRM更有针对性
缺点:
·非最优解
·效率不高,在 narrow环境 中效率低
·整个空间取样
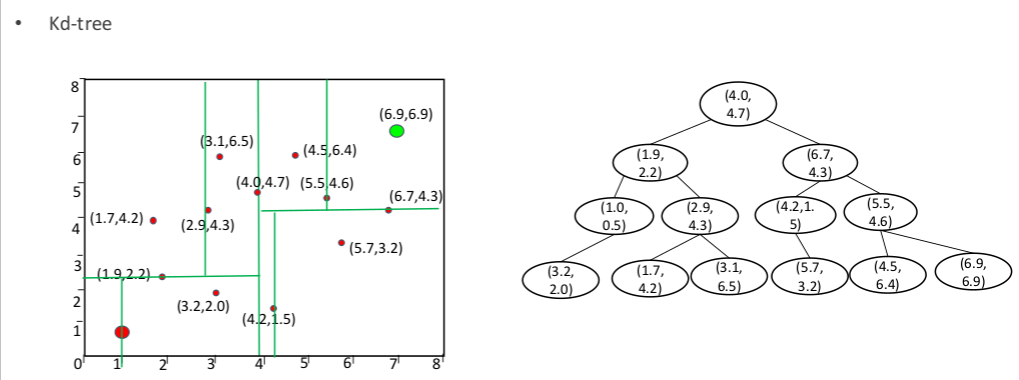
KD树
Kd-Tree,即K-dimensional tree,是一棵二叉树,树中存储的是一些K维数据。在一个K维数据集合上构建一棵Kd-Tree代表了对该K维数据集合构成的K维空间的一个划分,即树中的每个结点就对应了一个K维的超矩形区域(Hyperrectangle)。
关键术语:
- 维度(K):表示数据点所在的空间维数。例如,二维空间中的点有x和y坐标,三维空间中的点有x、y、z坐标。
- 节点:KD树的每个节点包含一个K维点及其分割超平面的信息。
- 超平面:在K维空间中用于将空间划分为两个部分的(K-1)维子空间。例如,二维空间中的超平面是直线,三维空间中的超平面是平面。
构建步骤:
输入数据:假设有N个K维数据点。
选择分割维度:按照循环顺序选择当前维度。例如,第一个维度(x轴)用于根节点,第二个维度(y轴)用于其子节点,依此类推。
选择分割值:在当前分割维度上找到中位数点,将其作为当前节点。
划分数据:
左子集:所有在当前分割维度上小于中位数点的点。
右子集:所有在当前分割维度上大于中位数点的点。
递归构建子树:对左子集和右子集重复上述步骤,直到所有点都被包含在树中。
终止条件:当某一子集为空时,递归终止。
使用KD树提高路径规划效率
Bidirectional RRT / RRT-Connect 双向快速扩展随机树
- 初始化两棵树:T_start 以 q_start 为根,T_goal 以 q_goal 为根。
- 重复以下过程直到路径找到或迭代上限:
a. 从状态空间中采样一个随机点 q_rand。
b. 使用 Extend 操作从 T_start 向 q_rand 延伸,得到 q_new。
c. 如果扩展成功:
i. 使用 Connect 操作让 T_goal 向 q_new 不断扩展,直到无法前进。
ii. 如果两个树在某个点连接,则路径找到。
d. 交换 T_start 和 T_goal。
| 项目 | 单向 RRT | 双向 RRT(RRT-Connect) |
|---|---|---|
| 扩展方向 | 只从起点扩展 | 起点和终点同时扩展 |
| 搜索速度 | 较慢 | 更快,更高效 |
| 成功率 | 容易陷入复杂障碍 | 双向推进更容易绕障碍 |
| 路径质量 | 一般 | 更好 |
| 复杂性 | 低 | 高 |
Optimal sampling-based path planning methods
在传统采样方法(如 RRT、PRM)的基础上,进一步加入了路径最优性保证的算法。最经典的代表是 RRT*
RRT*
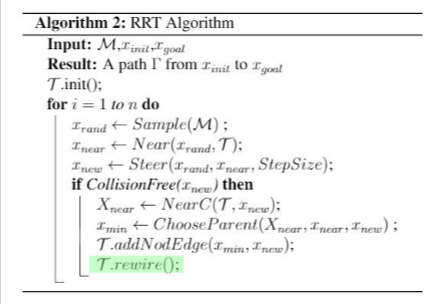
Choose Best Parent:在新节点周围半径内的已有节点中,选择一条“代价最小”的路径作为父节点;
Rewire:反过来看新节点是否能以更小的代价更新周围节点的父节点。
Kinodynamic-RRT*
更改Steer()函数以适应机器人的运动或其他限制导航(曲线)
Advanced Sampling-based Methods
Inform RRT*
一旦找到一条路径,其代价为 c_best,就只在以下区域采样:
从起点
q_start到终点q_goal的椭球体区域(Ellipsoidal Sampling Space)
半长轴为c_best/2,焦点为起点与终点,构成一个最短路径所有可能穿过的区域。
Cross-entropy motion planning
初始化一个轨迹分布模型
比如用高斯分布建模一条轨迹(多个中间点组成)
初始均值:可能是直线路径,初始方差大
采样多个轨迹
每条轨迹是从当前分布中采样得到的一个完整路径(可加速度约束等)
评估轨迹代价:碰撞检测、路径长度、平滑性、目标接近度等
选取表现最好的轨迹(Top-k):选出“精英轨迹”,即代价最小的那一部分
**用精英轨迹更新分布参数:**更新高斯均值和协方差,使下次采样更集中于好路径附近
迭代:重复 2-5,直到满足终止条件(如达到最小代价、收敛、超时等)