EPIC-RheinSim:复现仿真平台

图1-EPIC节点图
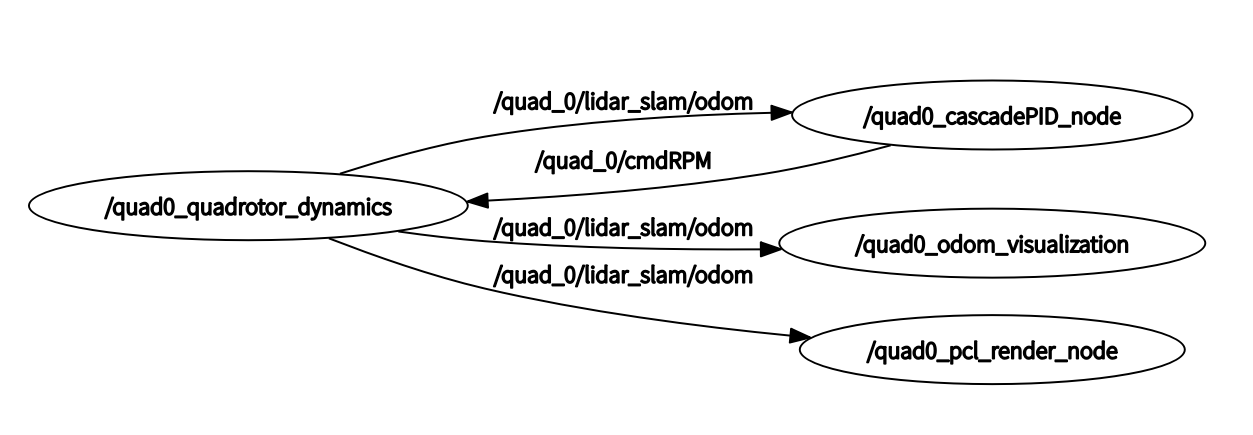
图2-MARSIM节点图
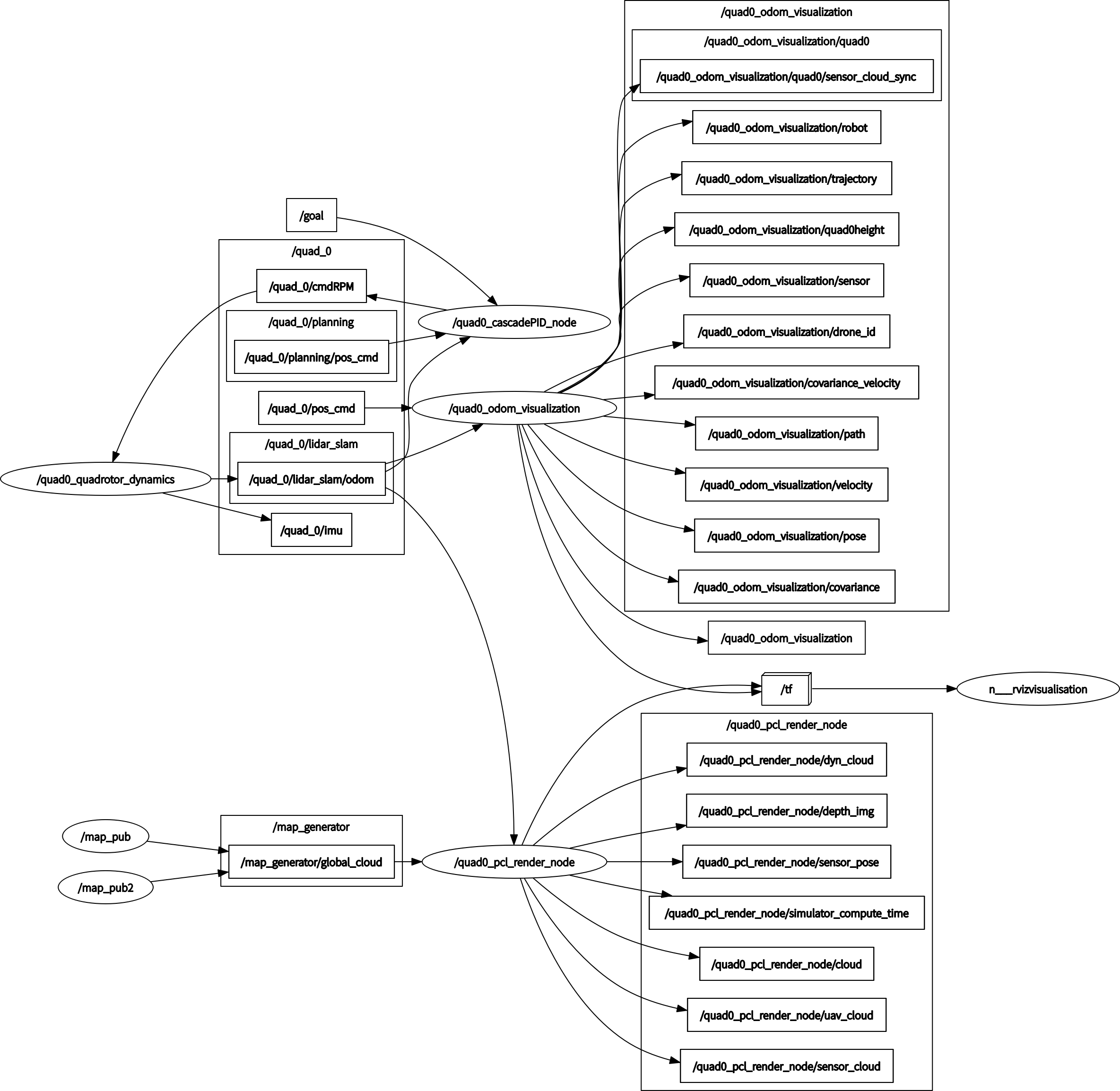
图3-MARSIM节点话题图
MARSIM节点:
/quad0_quadcopter_dynamics:仿真动力学模型节点。/quad0_cascadePID_node:把规划器给出的期望轨迹/位置指令,转换成每个电机的转速RPM。/quad0_pcl_render_node:传感器仿真(点云),根据当前位姿&环境模型生成LiDAR 点云。/quad0_odom_visualization:状态可视化 & 轨迹累积。
EPIC额外节点:
/waypoint_generator:探索目标 → 路径目标。/exploration_node:输入点云(未知 / 已知)、当前位姿、可达空间、viewpoints,调用轨迹规划。/traj_server:局部轨迹规划器,给出期望cmd/planning/pos_cmd